Developments
Location of launch vehicles falling fragments places.
Physical principles of falling fragments signals registration
Large fragments of launch vehicles have significant kinetic energies. The most part of the energy is converted in seismic energy and generates seismic waves when a fragment hits the ground. Shock waves (acoustic) are generated when parts of launch vehicles come through the atmosphere with supersonic speeds. The acoustic waves are also generated when a fragment hits the ground. Seismic and acoustic waves can be recorded at long distances. The maximal distance depends on the energy of the event and recording conditions.
Seismic location of falled fragments of launch vehicles
The first experiment on a seismic location of fall places was carried out on October 19-20 2007 near Baikonur space-vehicle launching site. The main goal of the experiment was to try to record signals generated by "Soyuz" first stage falling.
Several calibration shots were carried out for definition of a local velocity model in the experiment area.
The signals were registered by five three-component seismic stations. As a result of experiment all stations have recorded seismic signal generated by launch vehicle first stage hitting the ground and probable coordinates of falling place were determined.
 |
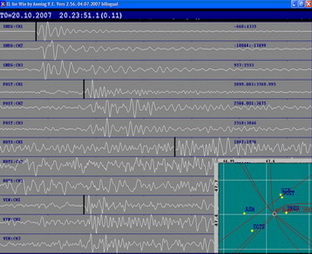 |
| Mobile seismic station GBV-316 | The recording of seismic event associated with falling of launch vehicle fragment. |
The distance between the point determined by seismic method and real coordinates of the launch vehicle fragment fall place was a 1.1 km.
Acoustic location of falling fragments of launch vehicles
Another result of the seismic location experiment was that very strong signals were found on the recording. The large time shifts between signals at the different channels are corresponds to propagation of the acoustic signal generated by a shock wave which came to seismometers. This observation prompts us to use also acoustic waves to locate falling fragment places.
In order to record acoustic signals mobile infrasound arrays were created. Microphones MP-201 were used as sensors of the arrays. KRSC had three mobile infrasound arrays in 2009. Each array consists of three microphones, ADC with data acquisition system and GPS for timing.
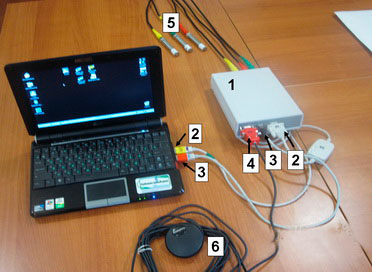 |
| Mobile infrasound array. 1 - power and ADC module; 5 - microphones MP-201; 6 - GPS |
The acoustic arrays are placed around a target area before launch. The microphones are installed at distances about 200 m. from each other.
 |
| Variants of microphons placing of mobile infrasound array. In the 3rd case an error of azimuth determination is the smallest for the direction shown by arrow. |
The mobile infrasound array enables to estimate a direction to a source and apparent velocity. Vapparent=Vsound in area around the array/cosß, ß-arrival angle.
Location by acoustic signals is very useful for searching of second stage fragments. The fragments have very small masses and can not generate detectable seismic waves but generate strong acoustic waves.
KRSC carried out several experiments on the acoustic location of rocket fragments at Altai region and north-eastern Kazakhstan together with Khrunichev space center. Three mobile arrays were used for registration. Each array has recorded large number (about hundred) of short impulse signals from different azimuths with different velocities. It is clear that these impulses correspond to shock waves generated by different pieces.
 |
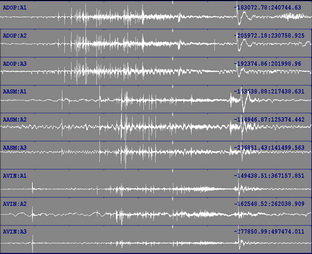 |
| Placing of mobile arrays in the target region (Altai). | The second stage acoustic signals recording example. |
Since there is a lot of separate signals at the recording we faced with a problem of the signals association (finding the signals generated by same sources). At the first stage we used first arrivals. However the azimuths do not intersect at one point. Therefore it was impossible to locate signals by the azimuths intersection. This is due to the fact that an object travelling with supersonic speed generates a shock wave in each point of trajectory and different stations can register the waves generated at different sections of the trajectory.
Therefore we decided to model a realistic falling trace variating initially calculated trajectory of a lunch vehicle. The azimuths and times of signals arrivals are calculated for each variant of the trace. More realistic trajectories are chosen by comparison of calculated and obtained times of signal arrivals. And the ends of these trajectories are assumed to be possible falling points of launch vehicle fragments.
However some of the acoustic signals registered by the various stations could not be associated with each other. The reason still remains unclear. It is possible that some signals are corresponds to waves which were reflected from relief prominences or clouds and therefore are not corresponds to realistic variants of trajectories. On the other hand it is possible that signals from smaller fragments are not registered by all three stations. And the third case is that several signals from different fragments could arrive at a station simultaneously.
Thus the method of acoustic signals association by a record of a few infrasound stations based on selecting of realistic trajectories of falling fragments was proposed in KRSC. However for the present it allows to explain just some of the signals. Accuracy of the method is difficult to estimate now because there are many factors which could lead to errors of data interpretation. Among them an uncertainty of mechanism of initial conditions generation for selection of trajectory, a distinction of a real atmosphere from empirical atmosphere model, a presence of wind which can cause azimuth estimation errors.